| Joseph N. Kanianthra Associate Administrator for Applied Research National Highway Traffic Safety Administration |
 [Click on image to enlarge] |
Good afternoon, Distinguished Guests and Fellow Delegates. Thank you Mr. Wani for those kind words of introduction. It is so good to see so many of you here, once again at this ESV conference. I congratulate Mr. Wani for organizing this session. The topic of discussion is very timely especially because of the advances in safety technologies that are taking place in automobiles worldwide. It is indeed a pleasure for me to participate in this enlightening session. It is not often that we discuss futuristic safety vision at ESV conferences. |
|
I have chosen as the topic today, a discussion of the role of advanced technologies in meeting the need for TOTAL SAFETY. I have chosen 2030 as the time frame even though it may not be seen as “the near future” to some. The concept of TOTAL SAFETY is not new. Dr.Tingval in Sweden espoused the concept of Zero fatalities several years ago. I believe similar concepts are under consideration in other jurisdictions as well. |
|
 [Click on image to enlarge] |
 [Click on image to enlarge] |
|
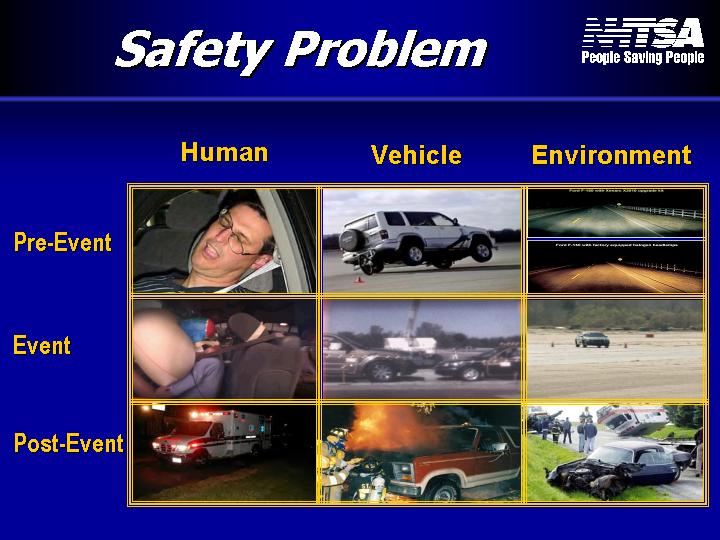
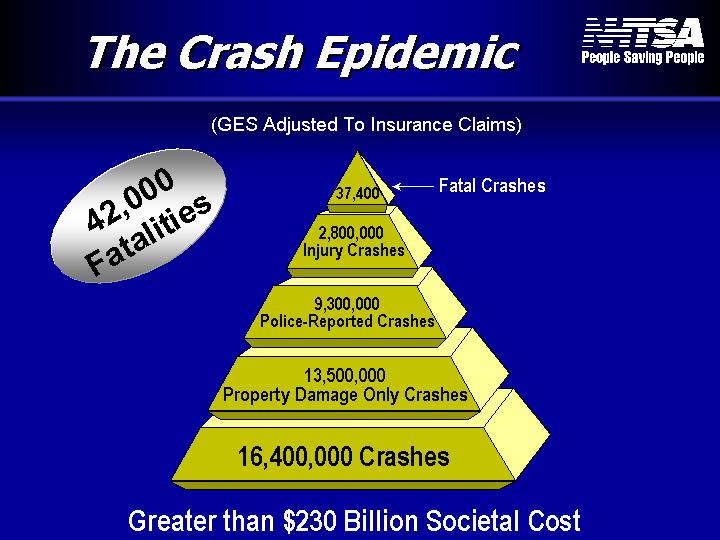
Every one of these cells represents many different problems that we have to deal with in safety. I need not elaborate the contents of each, as all of us are only too familiar with these problems. To give you a few examples, some injuries and fatalities result because the vehicle did not provide adequate protection. Others are caused by the roadway environment or roadside hardware. The failure of a vehicle to respond to drivers’ demands as in braking and the failure of drivers to keep vehicles under control for other reasons, also cause crashes. Drivers themselves are at fault in many instances because of impairment or failure to use the restraint systems that are available in vehicles. However, one difference must be noted here. Before many new technologies found their way in to vehicles, the problems depicted in these cells could have been treated as unique problems independently in finding solutions. That is not the case any more. They are interlinked much more now than one would imagine. That means- in finding solutions for one, we must consider its impact on another. Total Safety is achieved when we can eliminate the casualties that result due to the problems laid out here I am using here our own data in the United States for illustration purposes. As many of you already know, the total safety need is staggering. Our early assessment data estimates that in 2002, 42,850 lives were lost as a result of motor vehicle crashes. We have nearly 6.4 million police reported crashes, annually. Counting the non-reported crashes, the total crashes number about 12 million. Adjusted numbers based on insurance claims are even higher at 16 million. The economic burden of this problem is, thus, over $ 230 billion U.S. Dollars. |
|
 [Click on image to enlarge] |
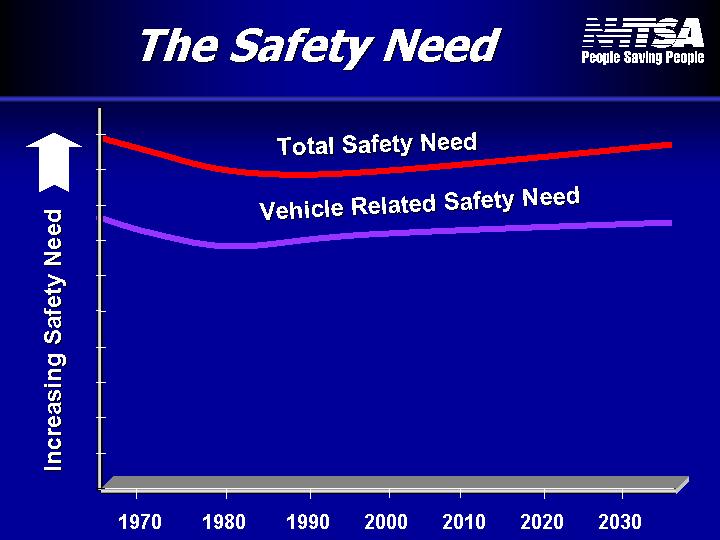
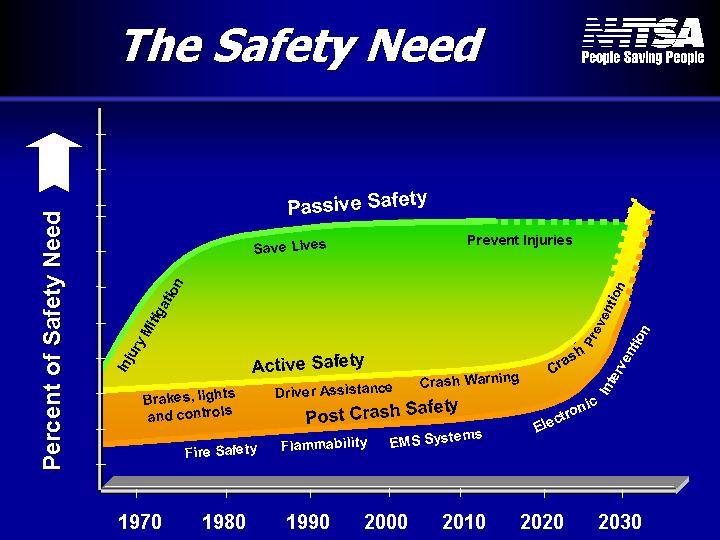
It is clear our goal should be TOTAL SAFETY. What I have shown in this slide are two lines - one representing the total safety need and the other the part of the total need represented by all aspects other than the roadway environment They are hypothetical lines even though they have some resemblance to reality. I have chosen the time period between 1970 and 2030 for discussion so that we can look at the past and look ahead to the future. These lines could be representing number of crashes, total fatalities or total injuries. |
|
As we look at the fatality trend in the United States, we see that there was a decline from over 50 thousand killed in the 1960’s to about 40 thousand in the 1990’s with small fluctuations in the intervening period. However, we can expect these numbers to creep back up again very slowly. We know that the number of vehicles and the miles traveled are increasing. There is population growth. Registered vehicles in United States have doubled from 1970 to 2001. Naturally, increased demand for personal transportation will increase the exposure. If nothing is done, this will lead to increases in crashes and the resulting casualties. So it is not surprising that there is this increasing demand for safety and you can expect this trend to continue in to the future in the absence of new initiatives. As safety improvements occur in vehicles, one would expect the demand for safety would be met. However, note that those improvements may not come fast enough to meet the total need. The gap between these two lines will thus show a widening trend |
|
 [Click on image to enlarge] |
Let us now look at what we have been doing to meet the demand for safety. Our efforts for the last so many years have been concentrated mostly on passive safety. Given a crash, we had to find ways to protect the occupant. Therefore, it is not surprising that our efforts went in that direction. It is also a well-known fact that in the last three decades, we have made tremendous strides in crash protection. And we are continuing to search for even more advanced technological solutions for better occupant protection. |
|
The advances made in improving vehicle crush characteristics, better crash energy management, improved restraint systems including inflatable systems, and other occupant protection countermeasures continue to contribute much to safety. There have also been advances in braking, lighting, vehicle control technologies, and other improvements both in pre-crash and post-crash safety. However, all of it taken together still addresses only a part of the total safety need and leaves us with a huge gap that we need to close to achieve total safety. It is evident that the gap that exists between the vehicle-related safety need and what is currently available through passive, active and post-crash safety countermeasures leaves us with a great deal of room for improvement. It is also clear that our focus on passive safety itself must change from injury mitigation and saving lives to injury prevention. It is commendable that many automobile manufacturers are already attempting to do that. The efforts to improve passive protection further will continue for the next decade with greater emphasis on refinements of countermeasures that are already under development. Pre-crash sensing, tailored inflation air bags and injury prevention through improved and adaptable belt systems such as variable pre-tensioning and load limiting would likely emerge. Even then, the incremental benefits will be leveling off. However, those approaches that are lagging behind represented by the two lines at the bottom must take a sharp turn upward to close this gap in the next two decades. I contend that, worse yet, this widening gap between the safety need and that would be available through existing countermeasures would continue to grow. And we have two decades available to make major improvements in crash prevention technologies for the design, development and deployment, provided the public would find them acceptable. The question then is how can we accelerate the process for closing this gap? I argue that some of the major problems that exist need to be solved through advances in safety technologies, new legislative approaches, collaborative research, use of market pull and conventional and novel methods for safety standards development. I contend that through our collective efforts it would be possible to achieve the desired results. As the trend lines here would indicate, if we continue our conventional approaches, that would not fill this gap. And this is our challenge. |
|
 [Click on image to enlarge] |
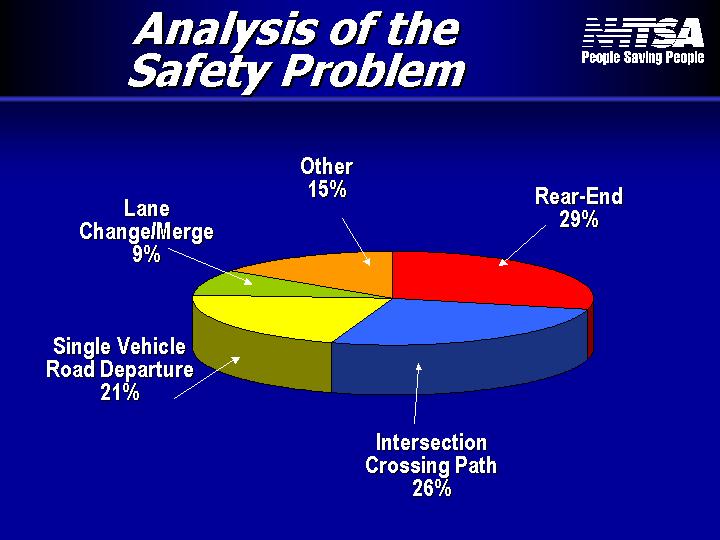
In the last several years NHTSA has attempted to address this issue by developing active safety countermeasures tailored to prevent crashes by using sensors, computers and communication devices. This chart shows the breakdown of the various crash types that make up the total number of police reported crashes in our database. Roughly 2 million of these crashes are injury producing while over 4 million are property damage only crashes. The largest subset of these crashes is rear-end crashes, followed by intersection type crashes, run-off the road crashes, lane-change and merge type crashes and others. |
 [Click on image to enlarge] |
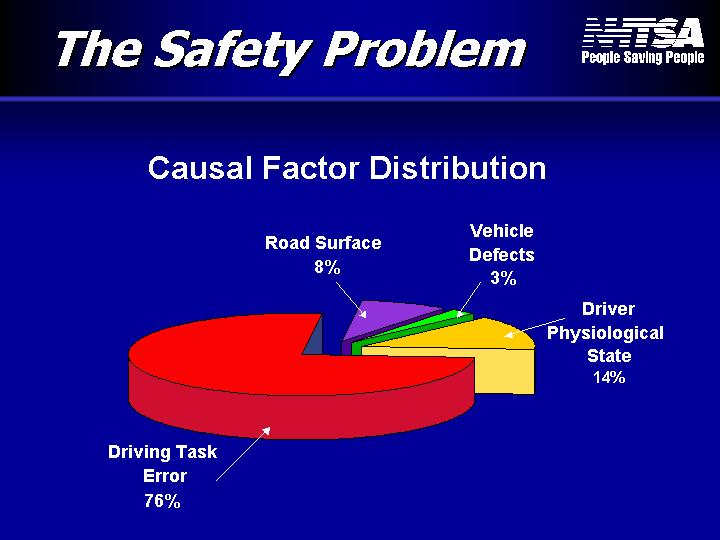
This slide gives the distribution of causal factors in producing the crashes mentioned in the previous chart. It is clearly seen that almost ľ of the problem is due to the driving task errors. Other driver related causes are physiological state of the drivers such as impairment, drowsiness or other such factors. Vehicle defects have a small part to play in this and so do road surface related causes. Our approach in active safety has been to use intelligent technologies to sense impending crashes. These technologies provide warnings to drivers in the event of a potential crash, to nudge them into taking appropriate preventive actions. |
| When necessary they also provide assistance in braking or in steering away from the road-edge or other dangerous situations to prevent these types of crashes. | |
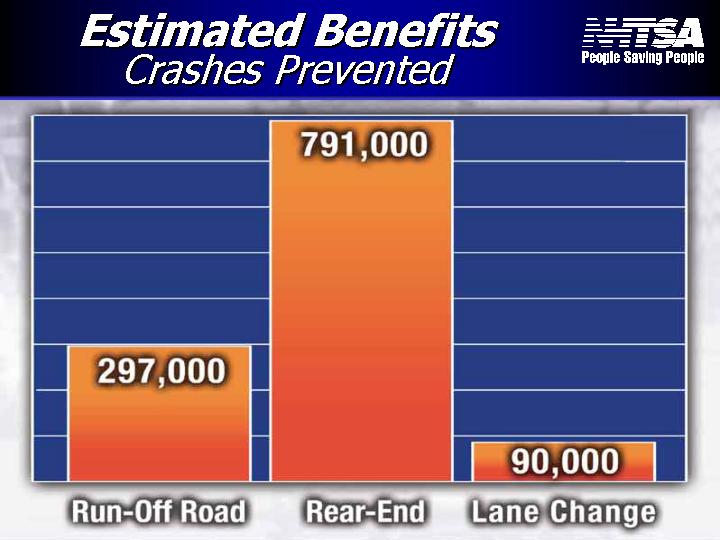 [Click on image to enlarge] |
Based on our research and the data we have acquired, preliminary estimates on anticipated benefits have already been determined. This slide show that these types of intelligent systems could prevent over 1 million crashes a year. However, the question remains, would these countermeasures, when deployed fleet-wide, achieve the sharp turn upward we need to make a dent in the problem we are trying to solve? Would these approaches be sufficient in accelerating the safety gains? |
|
The answer to this question lies in what would be the acceptable level of vehicle control the society is willing to accept. So far we have been delicately approaching crash prevention methods as I stated before. That may not be sufficient. We need a more aggressive approach. While our current methods of warning and delicate vehicle control might be sufficient when conditions are not anywhere near the limit, under limit conditions, we may have to move towards some control by the vehicle. Many drivers may find this unacceptable. However, as we gradually move into stability control, traction control, adaptive cruise control and other technologies, the public will slowly get used to it, and a time will come when more and more drivers will be willing to give up occasional control when the situation warrants it. But this is not going to occur fast. And our efforts must be geared to make this happen as early as possible. Our approach in research for developing technologies must move from “driver-in-the loop” towards, occasional, “driver-out-of-the-loop” when necessary. To make our systems fool proof, there must be test procedures developed for proper evaluation at sub-system and system level including fleet operational tests. Specifications for sensors and performance of algorithms must also be established and their performance determined. The transition from warning systems towards vehicle control systems cannot be sudden and it has to be smooth. The situation where a warning system is needed or the vehicle should assume control would be determined on the basis of what the vehicle sees as the level of the threat posed. |
|
 [Click on image to enlarge] |
When we analyze our accident data we find that total fatalities in alcohol related traffic crashes are over 40 percent. Imagine if you will, how well these inebriated drivers would heed crash avoidance-warning systems? If we had a vehicle that could determine that the driver is incapacitated, it would be safer for the vehicle to assume control, and that impaired driver could make it safely to his or her destination. |
 [Click on image to enlarge] |
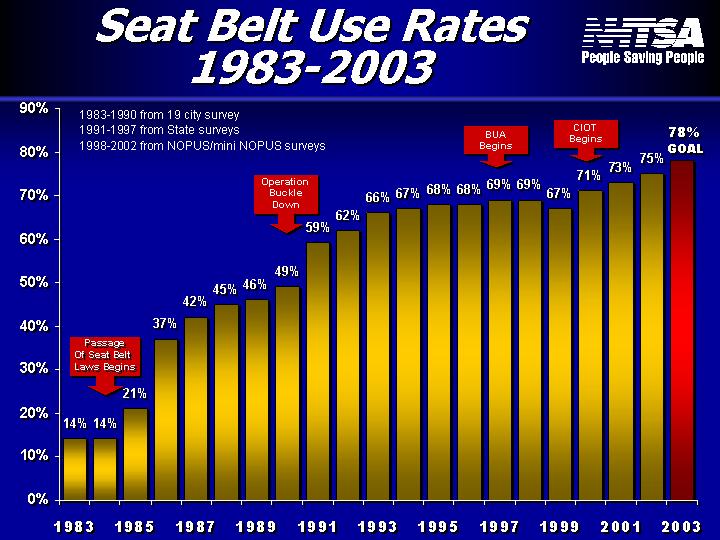
Our safety belt use, even though it is continuing to increase, was at 75 percent in 2002; and we have set a goal of 78 percent in 2003. We are continuing our best efforts in increasing safety belt use and are currently receiving much attention on this issu. |
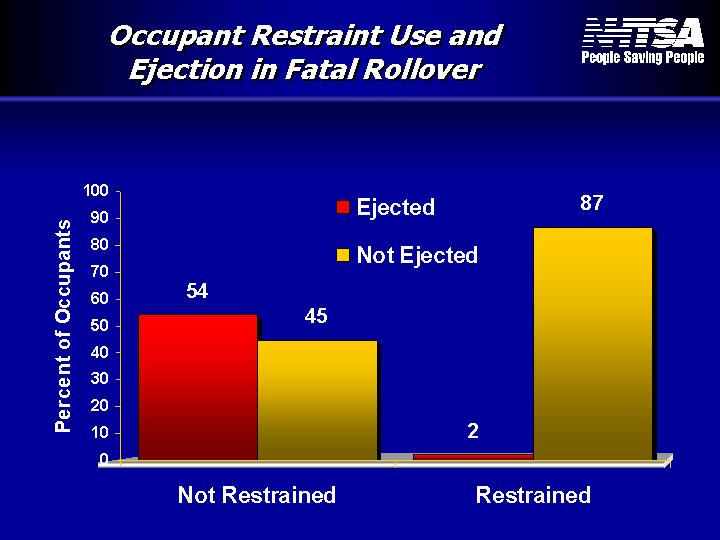
| This lack of safety belt use has allowed partial and full ejections to occur in rollover crashes. This slide shows ejections in fatal rollover crashes for belted occupants. They are far lower for belted occupants than for unbelted occupants. | |
 [Click on image to enlarge] |
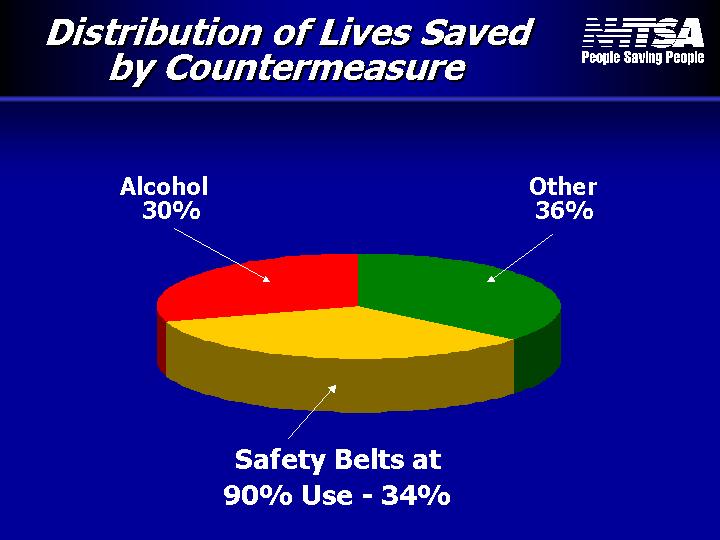
We have estimated that by increasing the safety belt use to 90 percent, and devising countermeasures to address the alcohol related safety problems—with those two approaches alone, we could save over 9,000 lives a year. And there is no reason why vehicle based solutions for increasing belt use and preventing alcohol related crashes could not be found to supplement other efforts to curb this epidemic. |
| However, other vehicle related safety countermeasures for preventing crashes, preventing injuries and protecting lives, could also create significant benefits. | |
 [Click on image to enlarge] |
There are also many other problems we have to contend with. For example, the percentage of light trucks and vans in the fleet has been steadily increasing. They account for 50 percent of our new vehicle sales and are currently 38 percent of the fleet. Because of the increasing size (weight and geometry) and stiffness of these vehicles, crash incompatibility is of great concern. |
 [Click on image to enlarge] |
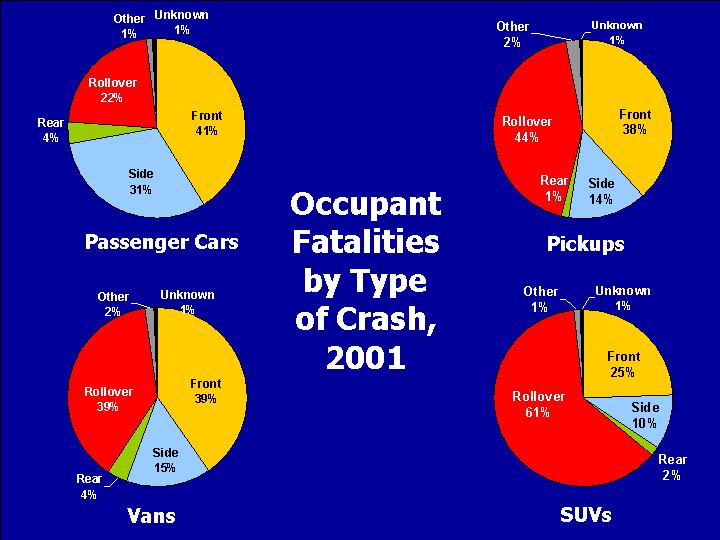
As you can see here, some of these larger vehicles are more likely to be involved in rollover crashes as well. Compare the rollover fatalities that are occurring in passenger cars with SUV’s, pickup’s and vans. Note that they are two to three times in pickups, vans and SUV’s in comparison to cars. So the problems are multifarious. Trying to address these problems in a piecemeal fashion might not achieve the end result we are looking for – namely closing this gap between the total safety need and the available safety through countermeasures. |
 [Click on image to enlarge] |
So what should our approach be in finding solutions to this dilemma? It is my humble opinion that use of advanced technologies can go a long way towards finding the necessary solutions for many of these problems. However, they cannot be technologies for technology’s sake. They must be designed to address specific problems and at the same time be properly tested and evaluated to determine their effectiveness. Using technologies, every subsystem in a vehicle must be able to communicate with every other subsystem, the driver and the environment so that they are in total harmony while operating the vehicle. |
|
Imagine if you will, a vehicle sensing the drivers’ actions and capabilities and knowing the vehicles’ own responses and the roadway conditions, bringing into action other technologies in the vehicle to prevent a crash. And when necessary, instead of resorting to “driver-in-the loop” warning system approaches, the vehicle decides to assume control as necessary. Should a driver be found lacking in his capacity for safe driving, the vehicle must be able to sense that and make adjustments in vehicle response behavior such as speed, handling, and suspension response in the pre-crash mode. A vehicle that senses an impending crash, looking at the driver to sense his capacity in taking evasive actions, and examining the traffic environment, should be able to determine whether that crash can be avoided. Should that not be possible, the next phase should be an attempt to reduce the severity of the likely crash and to prevent the injury from occurring even when the crash is at a severity beyond the anticipated level. The concept is, therefore, to treat the vehicle/driver/environment as a total system dealing with the pre-crash, crash and post-crash phases in consecutive steps. Is that doable? I am convinced that it can be, and some manufacturers are already moving in that direction. Therefore, the only question is not whether we can but how, and how fast? Imagine if you will, a “TOTAL SAFETY” vehicle and you are an alcohol impaired driver, not wearing the safety belt, attempting to drive at 75 mph while keeping the vehicle under control. To your dismay, you find that the car does not want to get on to the highway and refuses to respond to your commands and decides on its own what is best for you and the other occupants for safety’s sake. Are these concepts far fetched? Perhaps, but with the technologies available today, we should be able to produce such vehicles in the next two or three decades. And only then will we be able to achieve TOTAL SAFETY. |
|
 [Click on image to enlarge] |
How do we make sure that these technologies get deployed? These would involve collaborative research between suppliers, automotive industry, governments and others. We may need legislative assistance at the Federal and State level and empowerment of regulatory bodies to even try these approaches. We may have to modify the conventional regulatory approaches to get to where we want to be and try novel methods for standards development. |
|
We must show what is feasible and use market forces to achieve the results we are looking for. Through negotiated rules, or through consensus based and mandated standards, and through consumer information we should be able to achieve our goal – but regulatory bodies cannot possibly do it alone. We need to develop suitable test and evaluation procedures to determine the effectiveness of total systems, both with the “driver-in-the-loop” and “driver-out-of-the loop” systems. The governments and all other interested parties need each other in striving to achieve a common goal. While consensus is important, it cannot be at the cost of driving safety to the least common denominator. Governments’ goal should be to test as necessary to determine the effectiveness of systems in meeting the total safety need. And the industry should be designing systems that have the desired outcomes without unintended consequences while meeting the need for consumer acceptance. And the industry should abandon the approach of meeting a specific test requirement at one test condition, one impact point, and one seat position, using one dummy. Instead, let us use intelligent countermeasures that can adapt to a range of test speeds at different seating positions for different size occupants, all within acceptable limits. And let us develop a TOTAL SAFETY rating for every vehicle taking into consideration the pre-crash, crash, and post-crash performance expected for a range of drivers under various driving scenarios and driving environment. |
|
 [Click on image to enlarge] |
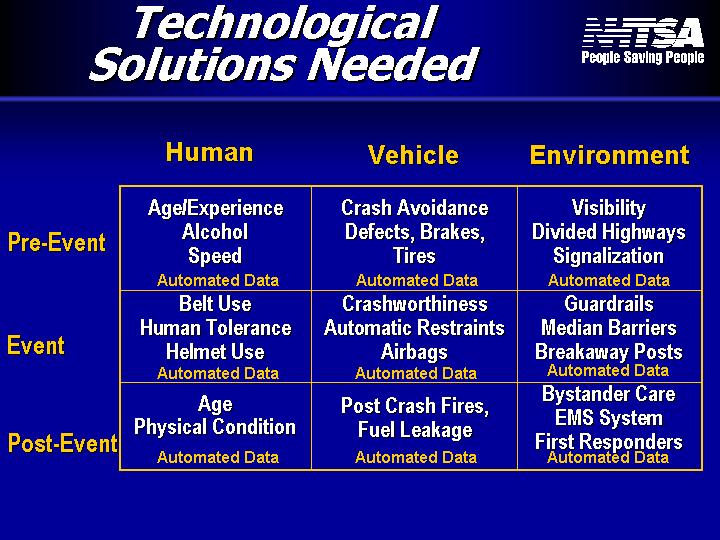
Solutions Needed I have once again reverted to the Haddon Matrix to put down the areas that need technical solutions. Many more items could be added here. In all of these areas, an absolute necessity is the data that must be collected – not using conventional means but automatically collecting data. The technologies are moving too fast to use our current model of defining safety problems of the future based on 15 year old, real world data. We need to have predictive capability in identifying future safety problems. |
 [Click on image to enlarge] |
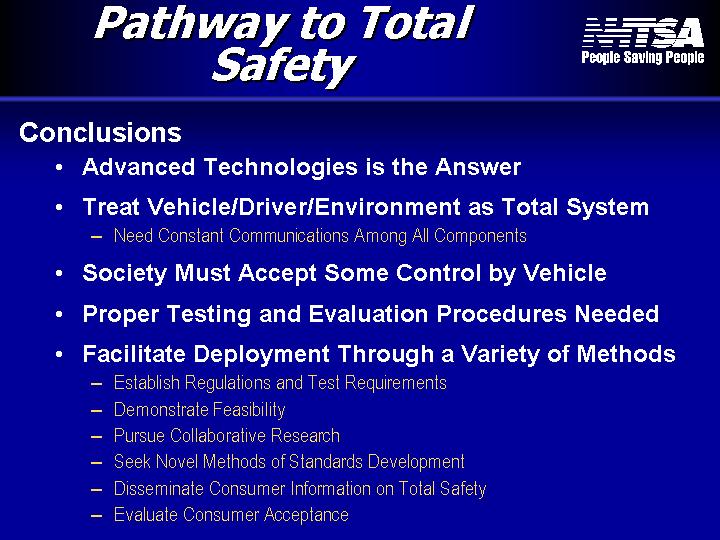
In conclusion, the gist of my presentation is that technologies can solve the safety problems, provided every subsystem is in constant communication with each other, the driver and the environment. As a society we must learn how to relinquish vehicle control, when we reach a stage of maturity in technology development to trust the vehicle’s judgment And, above all, we must have a proper means to test and evaluate systems as a whole in meeting its promised effectiveness. Last, we must facilitate deployment through a variety of methods including regulations. |
 [Click on image to enlarge] |
All of us can be proud of that day in 2030 when we have that Total Safety vehicle on the road. The technologies are available waiting to be incorporated in to vehicle design. What we need is a commitment from us all collectively to make it happen. When we have closed that gap we talked about earlier, we can rest easy. But our challenge is to accelerate the closing of that gap in safety, and the earlier we do it, the better off it will be for the motoring public, world-wide. Thank you. |